AVL概念
当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
- 它的左右子树都是AVL树
- 左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)
如果一棵二叉搜索树是高度平衡的,它就是AVL树。如果它有n个结点,其高度可保持在
O(log2n),搜索时间复杂度O(log2n)
AVL操作
插入
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
| bool insert(const pair<K, V> &kv)
{
if (_root == nullptr)
{
_root = new Node(kv);
return true;
}
Node *parent = nullptr;
Node *cur = _root;
while (cur)
{
if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->_left;
}
else if (cur->_kv.first < kv.first)
{
parent = cur;
cur = cur->_right;
}
else
{
return false;
}
}
cur = new Node(kv);
if (parent->_kv.first > kv.first)
{
parent->_left = cur;
}
else
{
parent->_right = cur;
}
cur->_parent = parent;
while (parent)
{
if (parent->_left == cur)
{
parent->_bf--;
}
else
{
parent->_bf++;
}
if (parent->_bf == 0)
{
break;
}
else if (abs(parent->_bf) == 1)
{
parent = parent->_parent;
cur = cur->_parent;
}
else if (abs(parent->_bf) == 2)
{
if (parent->_bf == 2 && cur->_bf == 1)
{
RotateL(parent);
}
else if (parent->_bf == -2 && cur->_bf == -1)
{
RotateR(parent);
}
else if (parent->_bf == 2 && cur->_bf == -1)
{
RotateRL(parent);
}
else if (parent->_bf == -2 && cur->_bf == 1)
{
RotateLR(parent);
}
else
{
assert(false);
}
break;
}
else
{
assert(false);
}
}
return true;
}
|
判断平衡
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
| bool is_balance()
{
return _is_balance(_root);
}
int get_height(Node *root)
{
if (root == nullptr)
return 0;
int left = get_height(root->_left);
int right = get_height(root->_right);
return max(left, right) + 1;
}
bool _is_balance(Node *root)
{
if (root == nullptr)
{
return true;
}
int left = get_height(root->_left);
int right = get_height(root->_right);
int diff = right-left;
if (diff != root->_bf)
{
cout << root->_kv.first << " 平衡因子异常" << endl;
return false;
}
return abs(diff) < 2 && _is_balance(root->_left) && _is_balance(root->_right);
}
|
平衡因子更新
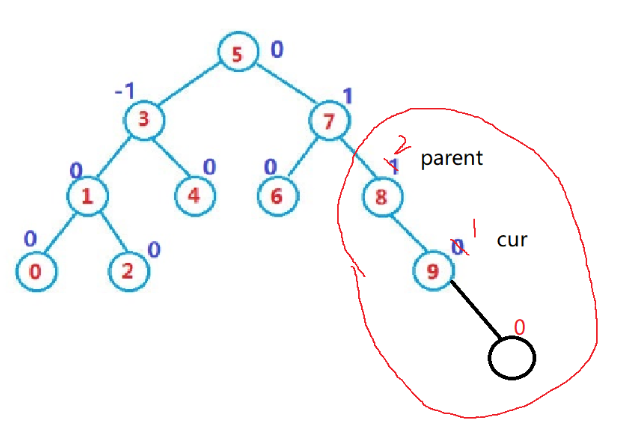
更新平衡因子的规则
- 新增在右,parent->bf++,新增在左,parent->bf–
- 更新后,parent->bf == 1 or -1, 说明parent插入前的平衡因子是0,说明左右子树高度相等,插入后有一边高,parent高度变了,需要继续往上更新
- 更新后,parent->bf == 0,说明parent插入前的平衡因子是1 or -1, 说明左右子树一边高一边低,插入后两边一样高,插入填上了矮的那边,parent所在子树高度不变,不需要往上更新
- 更新后,parent->bf == 2 or -2 ,说明parent插入前的平衡因子是1 or -1,已经平衡临界值,插入后变成2 or -2,打破平衡,parent所在子树需要旋转处理
- 更新后,parent->bf >2 or < -2,不可能,如果存在,则说明插入前就不是AVL树,需要去检查之前操作的问题
旋转的场景
旋转的价值和意义:
左单旋
情景分析
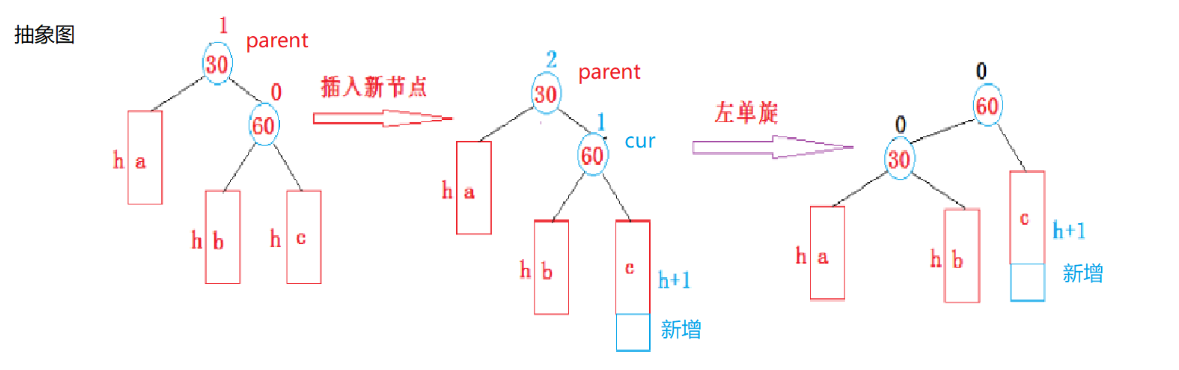
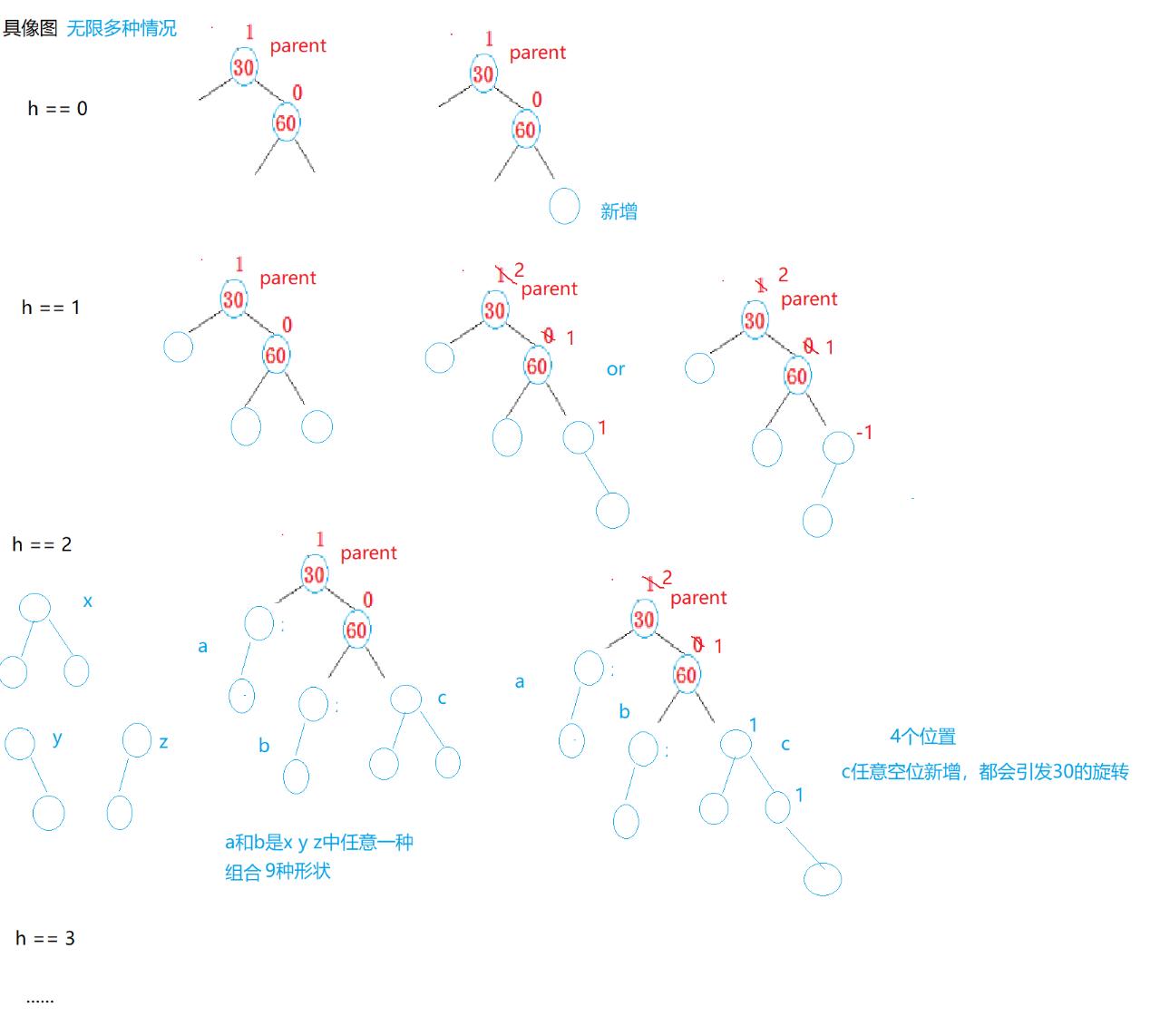
具体进行左旋的时候也要分两种情况
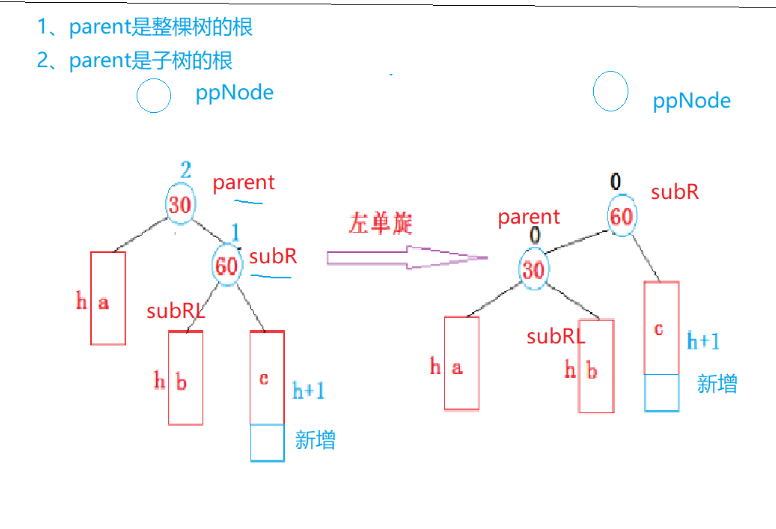
调整完成之后,parent的平衡因子变为0,subR变为新的根,同时平衡因子也变为0
代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
|
void RotateL(Node* parent)
{
Node *subR = parent->_right;
Node *subRL = subR->_left;
parent->_right = subRL;
if(subRL)
{
subRL->_parent = parent;
}
Node *ppNode = parent->_parent;
subR->_left = parent;
if(parent==_root)
{
_root = subR;
subR->_parent = nullptr;
}
else
{
if(ppNode->_left=parent)
{
ppNode->_left = subR;
}
else
{
ppNode->_right = subR;
}
subR->_parent = ppNode;
}
}
|
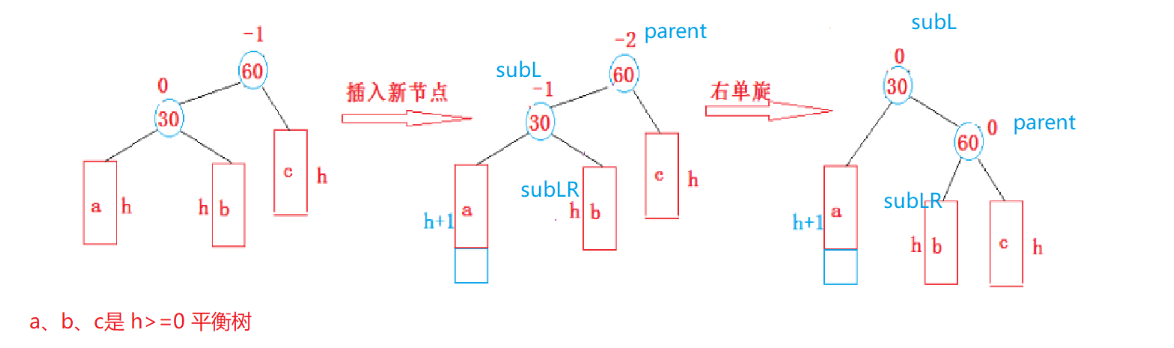
右单旋
情景分析‘
代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
|
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node *subLR = subL->_right;
Node *ppNode = parent->_parent;
parent->_left = subLR;
if(subLR)
{
subLR->_parent = parent;
}
subL->_right = parent;
parent->_parent = subL;
if(_root==parent)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subL;
}
else
{
ppNode->_right = subL;
}
subL->_parent = ppNode;
}
subL->_bf = 0;
parent->_bf = 0;
}
|
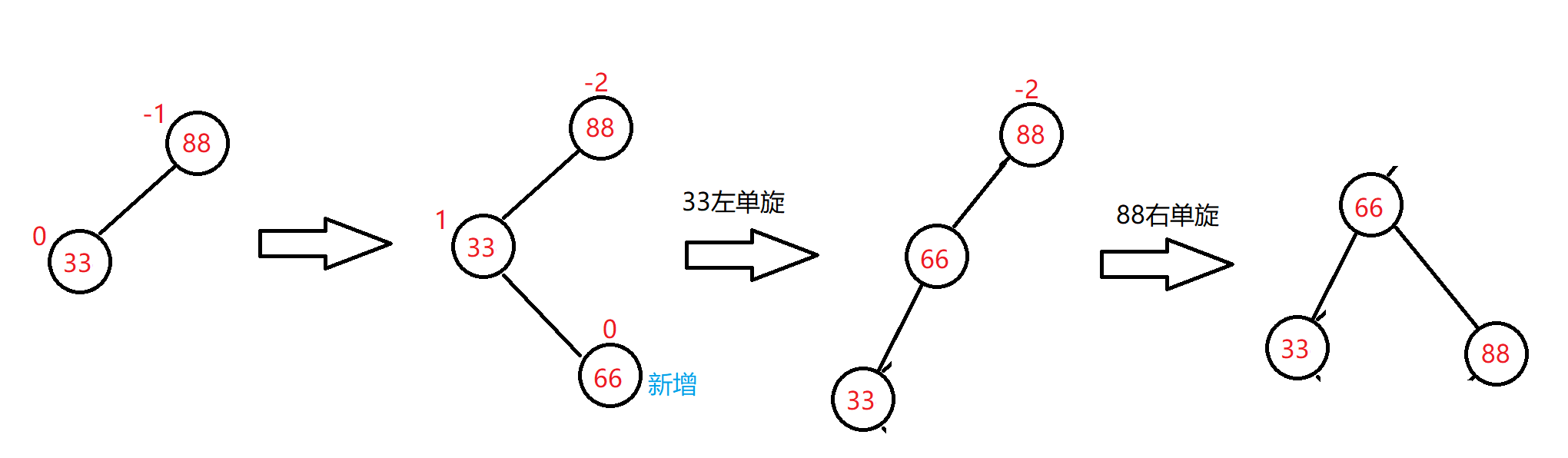
左右旋
情景分析
三种情况:
1、在b新增,那么60节点的平衡因子是-1
2、在c新增,那么60节点的平衡因子是1
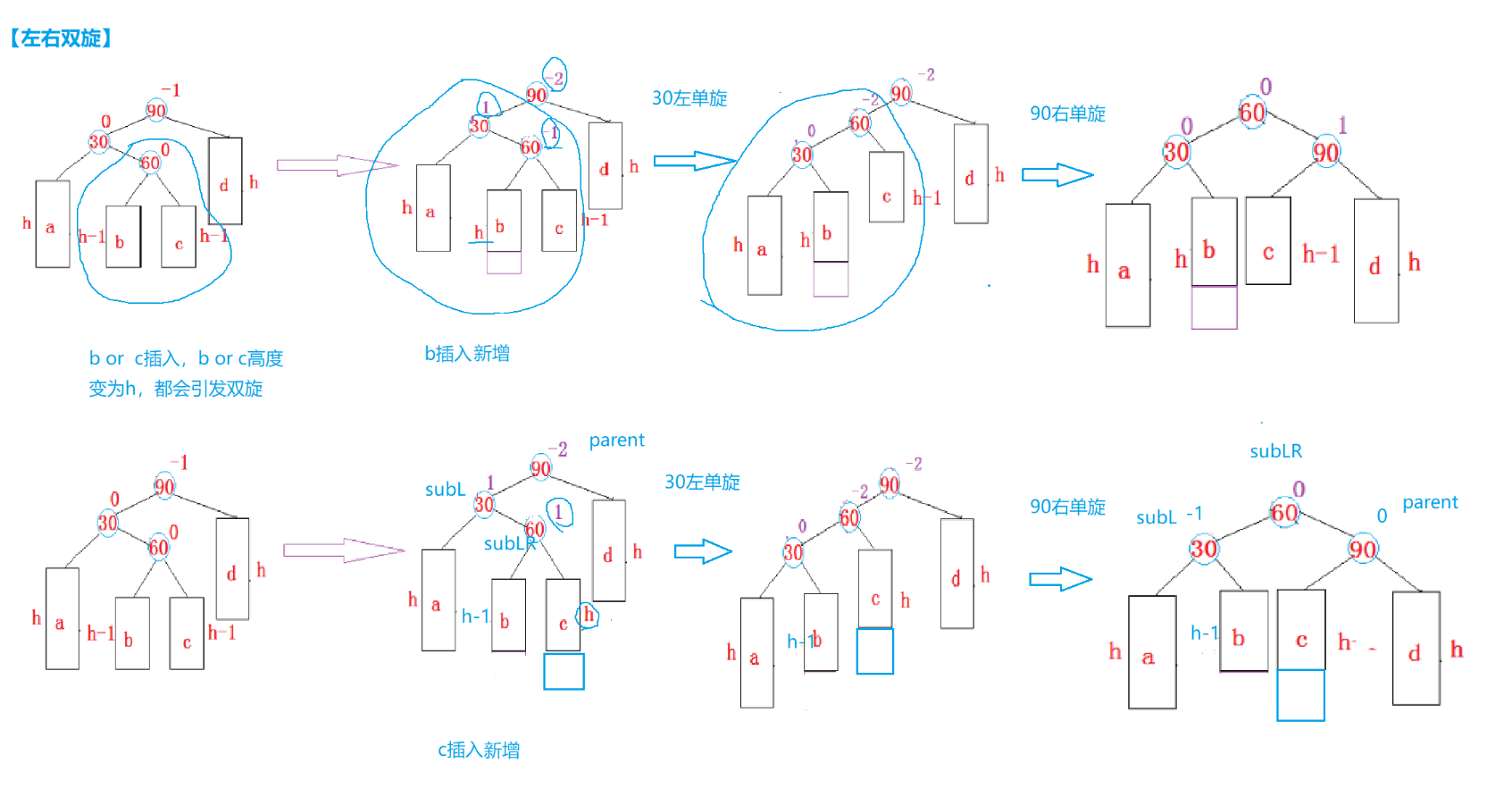
3、subLR就是新增
代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
|
void RotateLR(Node *parent)
{
Node *subL = parent->_left;
Node *subLR = subL->_right;
int bf = subLR->_bf;
RotateL(parent->_left);
RotateR(parent);
subLR->_bf = 0;
if (bf == -1)
{
parent->_bf = 1;
subL->_bf = 0;
}
else if (bf == 0)
{
parent->_bf = 0;
subL->_bf = 0;
}
else if (bf == 1)
{
parent->_bf = 0;
subL->_bf = -1;
}
else
{
assert(false);
}
}
|
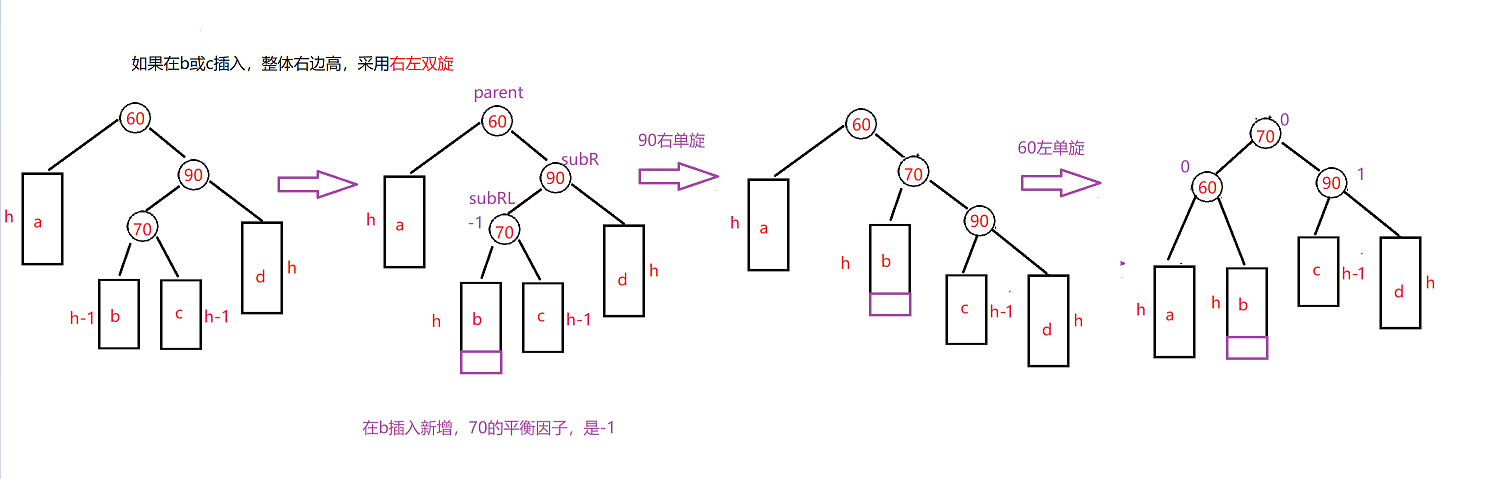
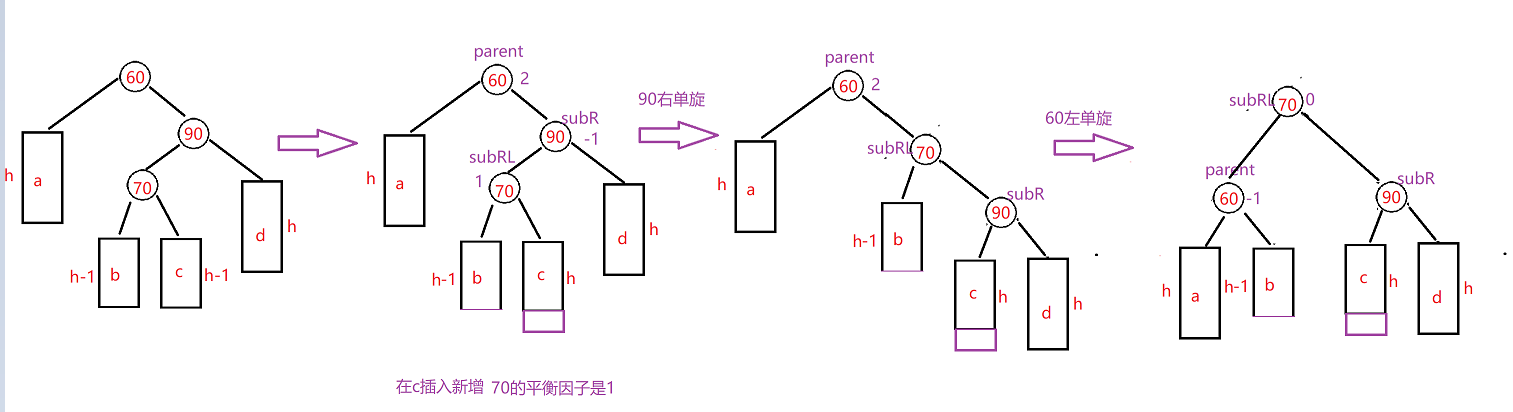
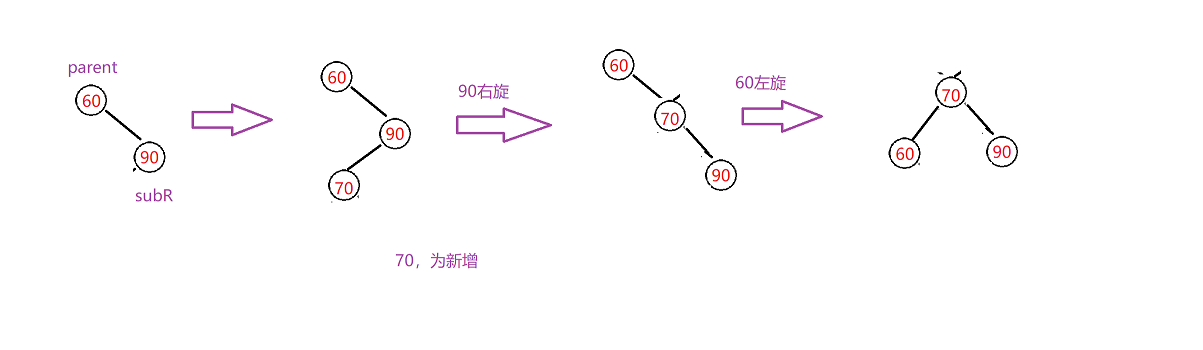
右左旋
情景分析
1、新增在b,那么subRL平衡因子变成-1,先对subR进行右旋,然后再对parent进行左旋,调整完成之后,subRL也就是70节点变成了根,平衡因子为0,parent的平衡因子为0,subR就是90的平衡因子变成1.
2、新增在c,那么subRL平衡因子变成1,先对subR进行右旋,然后再对parent进行左旋,调整完成之后,subRL也就是70节点变成了根,平衡因子为0,parent的平衡因子为-1,subR就是90的平衡因子变成0。
3、新增就是subRL,subRL平衡因子为0,调整完成后都是0
代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
|
void RotateRL(Node *parent)
{
Node *subR = parent->_right;
Node *subRL = subR->_left;
int bf = subRL->_bf;
RotateR(subR);
RotateL(parent);
subRL->_bf = 0;
if (bf == -1)
{
subR->_bf = 1;
parent->_bf = 0;
}
else if (bf == 0)
{
parent->_bf = 0;
subR->_bf = 0;
}
else if (bf == 1)
{
parent->_bf = -1;
subR->_bf = 0;
}
else
{
assert(false);
}
}
|

 微信
微信 支付宝
支付宝