多线程环境下对比malloc测试
测试代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 #include "ConcurrentAlloc.h" void BenchmarkMalloc (size_t ntimes, size_t nworks, size_t rounds) std::vector<std::thread> vthread (nworks) ; std::atomic<size_t > malloc_costtime = 0 ; std::atomic<size_t > free_costtime = 0 ; for (size_t k = 0 ; k < nworks; ++k) { vthread[k] = std::thread ([&, k]() { std::vector<void *> v; v.reserve (ntimes); for (size_t j = 0 ; j < rounds; ++j) { size_t begin1 = clock (); for (size_t i = 0 ; i < ntimes; i++) { v.push_back (malloc ((16 + i) % 8192 + 1 )); } size_t end1 = clock (); size_t begin2 = clock (); for (size_t i = 0 ; i < ntimes; i++) { free (v[i]); } size_t end2 = clock (); v.clear (); malloc_costtime += (end1 - begin1); free_costtime += (end2 - begin2); } }); } for (auto & t : vthread) { t.join (); } cout << nworks << "个线程并发执行" << rounds << "轮次,每轮次malloc " << ntimes << "次:花费:" << malloc_costtime << " ms" << endl; cout << nworks << "个线程并发执行" << rounds << "轮次,每轮次free " << ntimes << "次:花费:" << free_costtime << " ms" << endl; cout << nworks << "个线程并发malloc&free" << nworks * rounds * ntimes << "总计花费:" << malloc_costtime + free_costtime << " ms" << endl; } void BenchmarkConcurrentMalloc (size_t ntimes, size_t nworks, size_t rounds) std::vector<std::thread> vthread (nworks) ; std::atomic<size_t > malloc_costtime = 0 ; std::atomic<size_t > free_costtime = 0 ; for (size_t k = 0 ; k < nworks; ++k) { vthread[k] = std::thread ([&]() { std::vector<void *> v; v.reserve (ntimes); for (size_t j = 0 ; j < rounds; ++j) { size_t begin1 = clock (); for (size_t i = 0 ; i < ntimes; i++) { v.push_back (ConcurrentAlloc ((16 + i) % 8192 + 1 )); } size_t end1 = clock (); size_t begin2 = clock (); for (size_t i = 0 ; i < ntimes; i++) { ConcurrentFree (v[i]); } size_t end2 = clock (); v.clear (); malloc_costtime += (end1 - begin1); free_costtime += (end2 - begin2); } }); } for (auto & t : vthread) { t.join (); } cout << nworks << "个线程并发执行" << rounds << "轮次,每轮次concurrent alloc " << ntimes << "次:花费:" << malloc_costtime << " ms" << endl; cout << nworks << "个线程并发执行" << rounds << "轮次,每轮次concurrent dealloc " << ntimes << "次:花费:" << free_costtime << " ms" << endl; cout << nworks << "个线程并发concurrent alloc&dealloc" << nworks * rounds * ntimes << "总计花费:" << malloc_costtime + free_costtime << " ms" << endl; } int main () size_t n = 10000 ; cout << "==========================================================" << endl; BenchmarkConcurrentMalloc (n, 4 , 10 ); cout << endl << endl; BenchmarkMalloc (n, 4 , 10 ); cout << "==========================================================" << endl; return 0 ; }
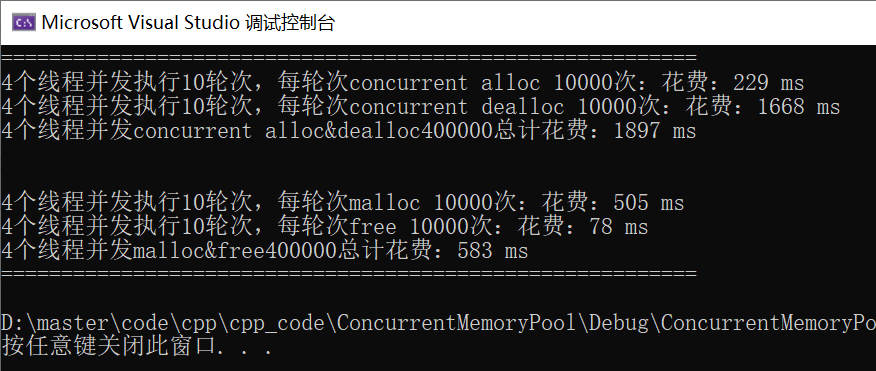
申请释放固定内存大小
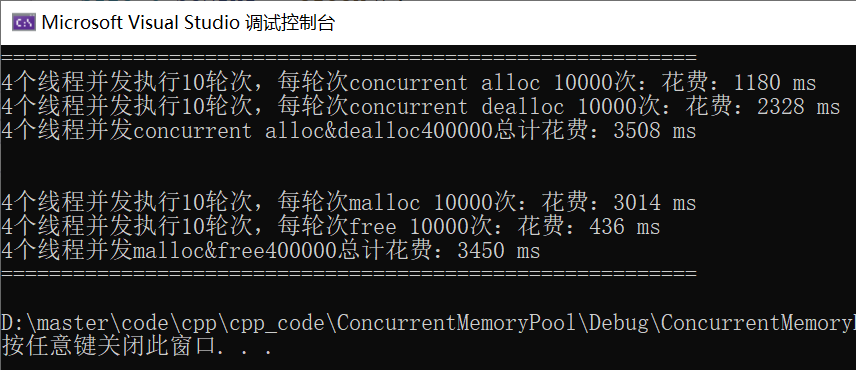
申请释放不同内存大小
性能瓶颈分析
上述测试发现,我们的内存池比malloc还是差一些的,但是不大容易知道到底是代码的哪一个部分消耗的性能较多,不知道性能的瓶颈在哪里,这时候可以使用性能分析工具
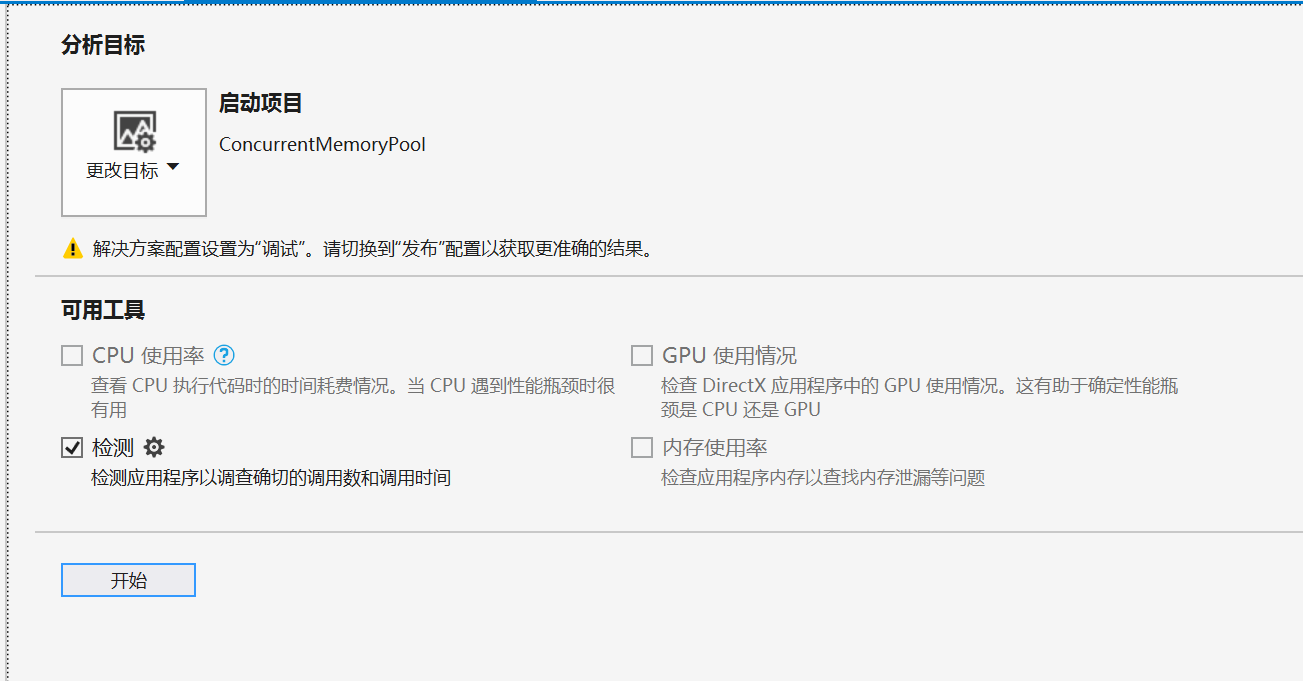
打开性能探查器,可用工具类,检测项打上对号
点击开始
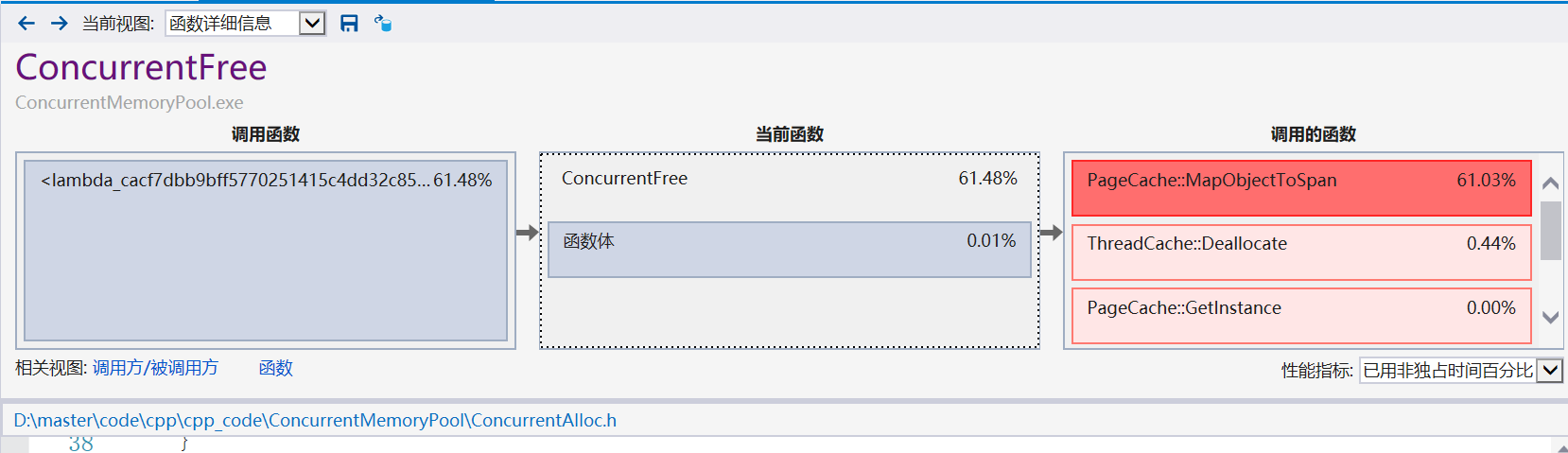
可以发现MapObjectToSpan所花费时间非常长,因为涉及到锁的竞争问题,那么我们应该如何进行优化呢?
基数树优化
这里使用基数树进行优化,基数树实际是一个分层的哈希表,根据所分层数,可以分为单层基数树、二层基数树、三层基数树
单层基数树
单层基数树使用的是直接定址法,在32位平台下,最多分成2^32/2^13次方个页,我们直接开2^(31-13)次方大小的数组
这这里可以用非类型模板参数,将次方传入,1<< BITS 就是2的BITS次方。直接开这么长的数组
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 template <int BITS>class TCMalloc_PageMap1 {private : static const int LENGTH = 1 << BITS; void ** array_; public : typedef uintptr_t Number; explicit TCMalloc_PageMap1 () size_t size = sizeof (void *) << BITS; size_t alignSize = SizeClass::_RoundUp(size, 1 << PAGE_SHIFT); array_ = (void **)SystemAlloc (alignSize >> PAGE_SHIFT); memset (array_, 0 , sizeof (void *) << BITS); } void * get (Number k) const if ((k >> BITS) > 0 ) { return NULL ; } return array_[k]; } void set (Number k, void * v) array_[k] = v; } };
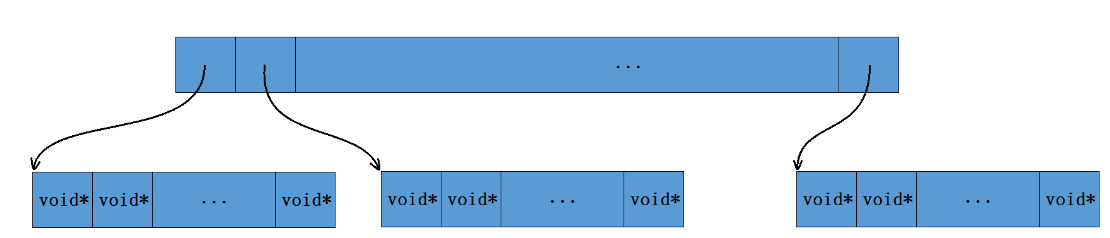
二层基数树
假设同样在32位平台下,最多分成2^32/2^13 = 2^19次方个页,最多用19个比特位可以标识,用二层得基数树,第一层只用5个比特位,做直接定址,对应的下标存的元素是 void* values[LEAF_LENGTH],剩下的14位可以总共映射 length = 1<<14个数据
代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 template <int BITS>class TCMalloc_PageMap2 {private : static const int ROOT_BITS = 5 ; static const int ROOT_LENGTH = 1 << ROOT_BITS; static const int LEAF_BITS = BITS - ROOT_BITS; static const int LEAF_LENGTH = 1 << LEAF_BITS; struct Leaf { void * values[LEAF_LENGTH]; }; Leaf* root_[ROOT_LENGTH]; void * (*allocator_)(size_t ); public : typedef uintptr_t Number; explicit TCMalloc_PageMap2 () memset (root_, 0 , sizeof (root_)); PreallocateMoreMemory (); } void * get (Number k) const const Number i1 = k >> LEAF_BITS; const Number i2 = k & (LEAF_LENGTH - 1 ); if ((k >> BITS) > 0 || root_[i1] == NULL ) { return NULL ; } return root_[i1]->values[i2]; } void set (Number k, void * v) const Number i1 = k >> LEAF_BITS; const Number i2 = k & (LEAF_LENGTH - 1 ); ASSERT (i1 < ROOT_LENGTH); root_[i1]->values[i2] = v; } bool Ensure (Number start, size_t n) for (Number key = start; key <= start + n - 1 ;) { const Number i1 = key >> LEAF_BITS; if (i1 >= ROOT_LENGTH) return false ; if (root_[i1] == NULL ) { static ObjectPool<Leaf> leafPool; Leaf* leaf = (Leaf*)leafPool.New (); memset (leaf, 0 , sizeof (*leaf)); root_[i1] = leaf; } key = ((key >> LEAF_BITS) + 1 ) << LEAF_BITS; } return true ; } void PreallocateMoreMemory () Ensure (0 , 1 << BITS); } };
在32位平台下,第一层数组占,2^5* 4=2^7字节,第二层最多有2^5^2^14^4=2^21=2M,消耗也不大,可以直接全开出来
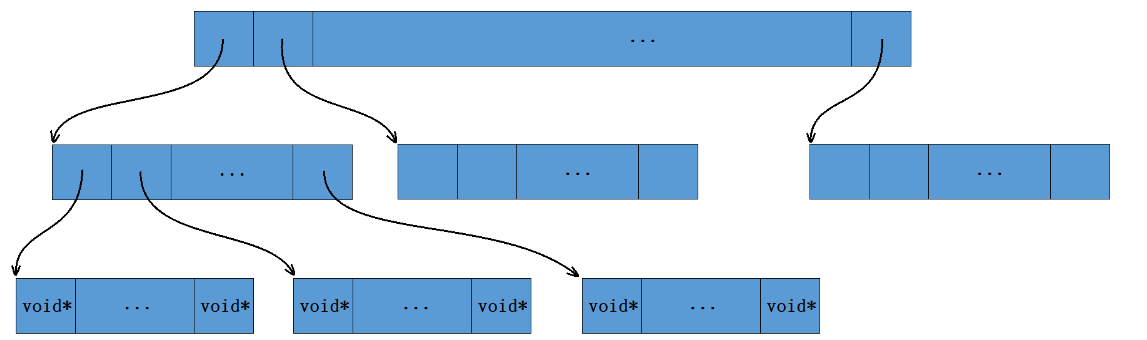
三层基数树
64位平台下,公共有2^64/2^13=2^51个页,一层基数树肯定不行,二层页不大行,用三层基数树,三层基数树就是将存储页号的比特位分三次映射
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 template <int BITS>class TCMalloc_PageMap3 { private : static const int INTERIOR_BITS = (BITS + 2 ) / 3 ; static const int INTERIOR_LENGTH = 1 << INTERIOR_BITS; static const int LEAF_BITS = BITS - 2 * INTERIOR_BITS; static const int LEAF_LENGTH = 1 << LEAF_BITS; struct Node { Node* ptrs[INTERIOR_LENGTH]; }; struct Leaf { void * values[LEAF_LENGTH]; }; Node* NewNode () { static ObjectPool<Node> nodePool; Node* result = nodePool.New (); if (result != NULL ) { memset (result, 0 , sizeof (*result)); } return result; } Node* root_; public : typedef uintptr_t Number; explicit TCMalloc_PageMap3 () { root_ = NewNode (); } void * get (Number k) const { const Number i1 = k >> (LEAF_BITS + INTERIOR_BITS); const Number i2 = (k >> LEAF_BITS) & (INTERIOR_LENGTH - 1 ); const Number i3 = k & (LEAF_LENGTH - 1 ); if ((k >> BITS) > 0 || root_->ptrs[i1] == NULL || root_->ptrs[i1]->ptrs[i2] == NULL ) { return NULL ; } return reinterpret_cast <Leaf*>(root_->ptrs[i1]->ptrs[i2])->values[i3]; } void set (Number k, void * v) { assert (k >> BITS == 0 ); const Number i1 = k >> (LEAF_BITS + INTERIOR_BITS); const Number i2 = (k >> LEAF_BITS) & (INTERIOR_LENGTH - 1 ); const Number i3 = k & (LEAF_LENGTH - 1 ); Ensure (k, 1 ); reinterpret_cast <Leaf*>(root_->ptrs[i1]->ptrs[i2])->values[i3] = v; } bool Ensure (Number start, size_t n) { for (Number key = start; key <= start + n - 1 ;) { const Number i1 = key >> (LEAF_BITS + INTERIOR_BITS); const Number i2 = (key >> LEAF_BITS) & (INTERIOR_LENGTH - 1 ); if (i1 >= INTERIOR_LENGTH || i2 >= INTERIOR_LENGTH) return false ; if (root_->ptrs[i1] == NULL ) { Node* n = NewNode (); if (n == NULL ) return false ; root_->ptrs[i1] = n; } if (root_->ptrs[i1]->ptrs[i2] == NULL ) { static ObjectPool<Leaf> leafPool; Leaf* leaf = leafPool.New (); if (leaf == NULL ) return false ; memset (leaf, 0 , sizeof (*leaf)); root_->ptrs[i1]->ptrs[i2] = reinterpret_cast <Node*>(leaf); } key = ((key >> LEAF_BITS) + 1 ) << LEAF_BITS; } return true ; } void PreallocateMoreMemory () {}};
当需要建立某一页号的映射关系时,先确保存储该页映射的数组空间是开好的,调用Ensure函数,如果没开好,就开辟对应的空间
使用基数树优化
我们在32位平台下测试,直接使用一层基数树即可将unordered_map替换成基数树的结构,并用set和get函数,替换方括号和find的作用
更改代码
1 TCMalloc_PageMap1<32 - PAGE_SHIFT> _idSpanMap;
建立映射:
1 _idSpanMap.set (span->_pageId, span);
读取Span
1 Span* ret = (Span*)_idSpanMap.get (id);
优化原理
基数树的检索可能略好一点,但是最重要的是基数树的结构不需要加锁,map和unordered_map,插入数据底层的数据结构可能会变化,比如红黑树的选择,哈希表的扩容,所以在读取映射关系时需要加锁,但是基数树一旦开好空间就不会发生变化。
性能对比
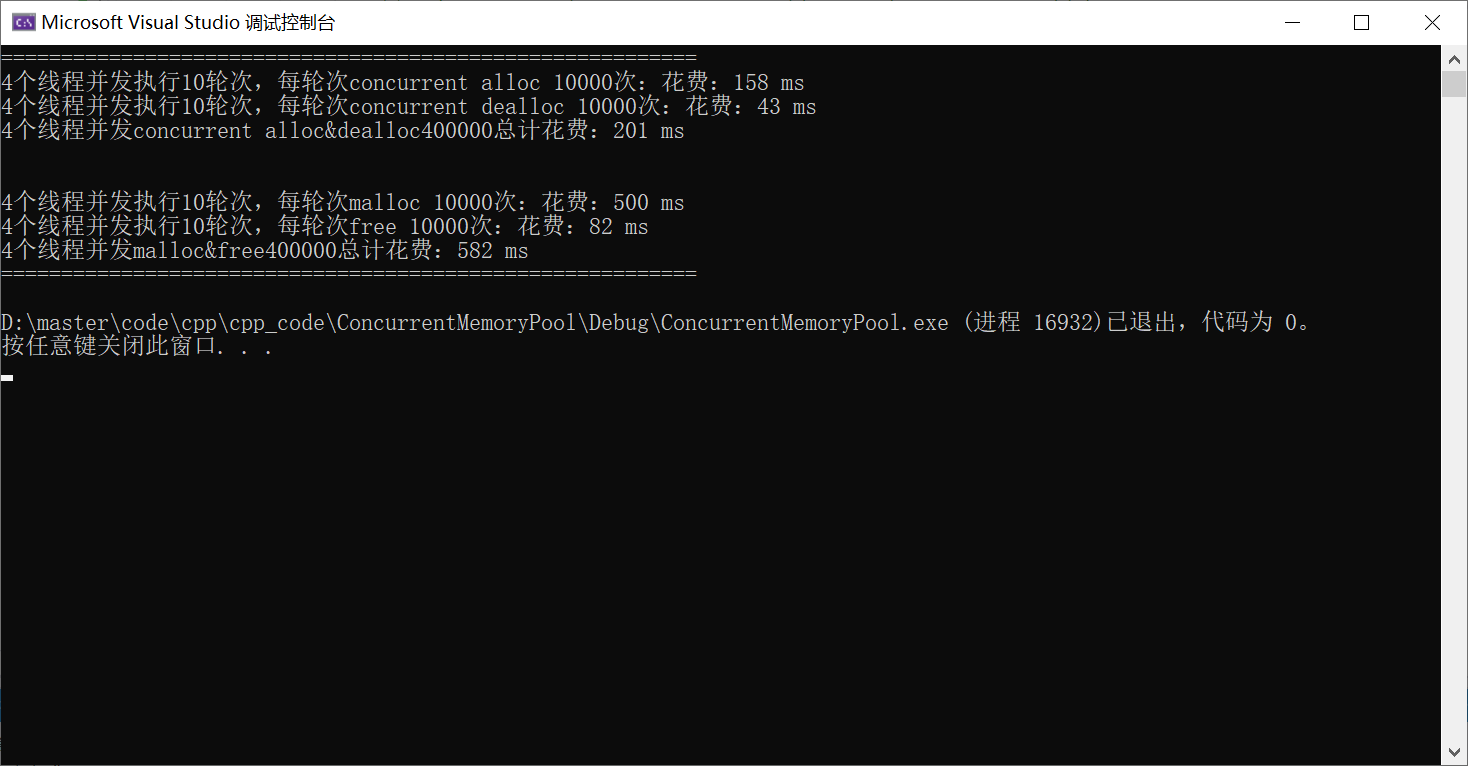
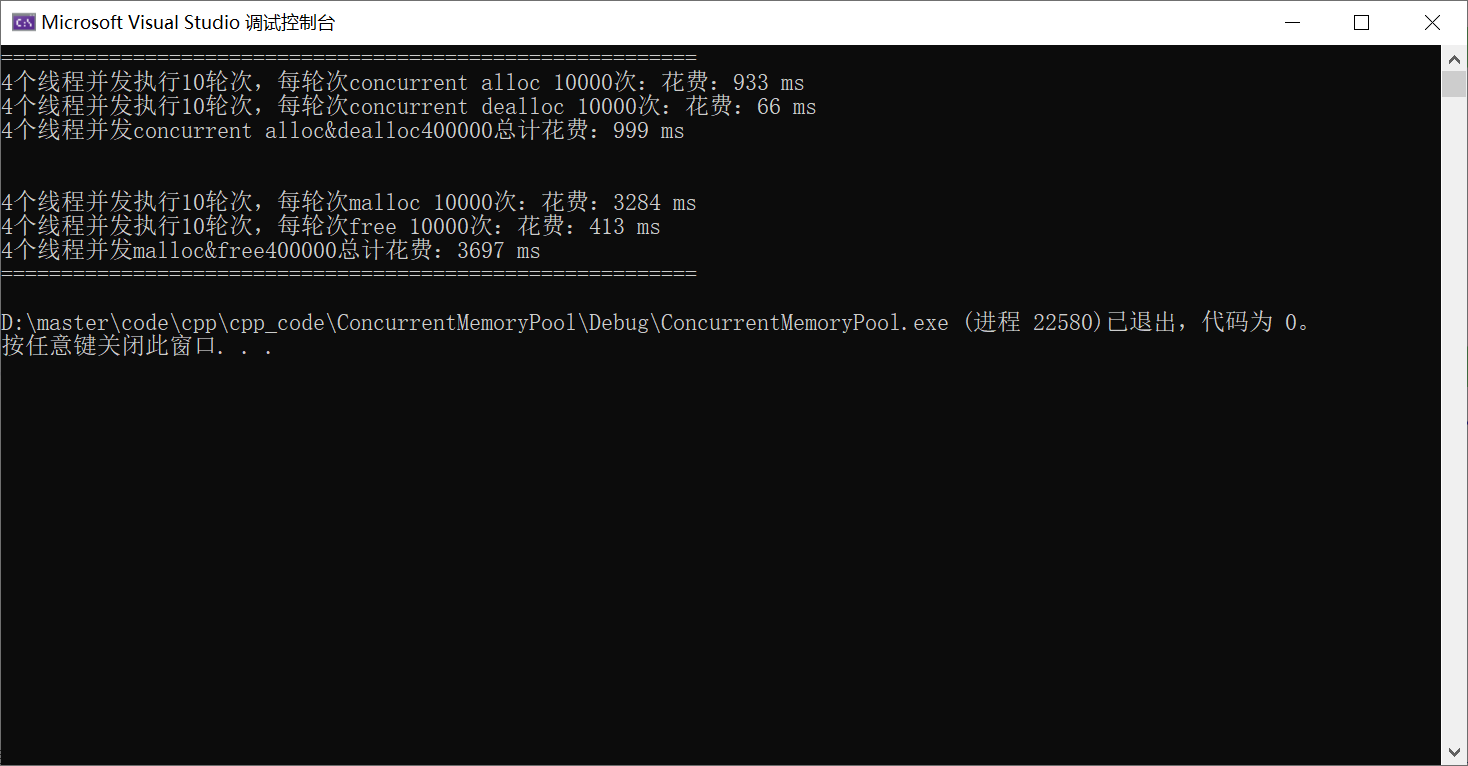
再次与malloc进行对比
固定大小的对象的申请和释放
不固定大小的对象的申请和释放
可以看到两种场景,都比malloc快2~3倍左右



 微信
微信 支付宝
支付宝